

寶米勒變頻器在施工升降機(jī)中的應(yīng)用
bmller 2021-04-02
一、 引言
施工升降機(jī)是現(xiàn)代高層施工中必不可少的重要的垂直運(yùn)輸設(shè)備。特別是在高層、超高層建筑施工中擔(dān)任了極其重要的任務(wù),對(duì)于保證施工工期與安全,降低施工成本,減輕勞動(dòng)強(qiáng)度起著不可替代的作用。本文介紹寶米勒起重專用變頻器在人貨兩用施工升降機(jī)上的應(yīng)用、調(diào)試和現(xiàn)場(chǎng)功能測(cè)試驗(yàn)證。
二、 施工升降機(jī)介紹
升降機(jī)作為一般高層建筑輸送人員及散碎材料的垂直運(yùn)輸設(shè)備已被廣泛應(yīng)用,普通施工升降機(jī)由于控制方式和設(shè)計(jì)等原因,存在以下幾個(gè)問(wèn)題:
1、 采用接觸器控制,運(yùn)行速度單一,一般速度為34-38m/min,運(yùn)行速度低,影響施工速度和施工企業(yè)效益,對(duì)高層建筑此問(wèn)題表現(xiàn)突出。如單純提高速度將造成加速度過(guò)大,結(jié)構(gòu)和機(jī)構(gòu)所受沖擊過(guò)大而加快齒輪齒條及制動(dòng)盤(pán)的磨損,降低運(yùn)行可靠性和增加維護(hù)成本。
2、 啟動(dòng)沖擊大,對(duì)結(jié)構(gòu)和機(jī)構(gòu)損壞較嚴(yán)重。
3、 普通施工升降機(jī)采用機(jī)械抱閘強(qiáng)制制動(dòng),升降機(jī)從高速突然降到零速,由于慣性作用, 強(qiáng)制抱閘對(duì)結(jié)構(gòu)和機(jī)構(gòu)沖擊大,載人舒適度差,載貨料沖擊大。
4、 一般采用直接啟動(dòng)或者星三角降壓?jiǎn)?dòng),啟動(dòng)電流大,對(duì)電網(wǎng)沖擊大,影響其他設(shè)備的正常運(yùn)行。
5、 負(fù)載變化造成停位不準(zhǔn)確,對(duì)司機(jī)經(jīng)驗(yàn)要求較高。
普通施工升降機(jī)減速到平層時(shí)無(wú)爬行過(guò)程,由運(yùn)行速度直接向零速減速,升降機(jī)的平層是靠司機(jī)目測(cè)手動(dòng)控制實(shí)現(xiàn),效率低,經(jīng)常要上、下點(diǎn)動(dòng)幾次才能準(zhǔn)確平層。
三、寶米勒起重專用變頻器介紹
寶米勒起重機(jī)專用矢量變頻器,采用先進(jìn)的控制理論,具有優(yōu)異的力矩控制性能,專業(yè)針對(duì)起重配套行業(yè)設(shè)計(jì),可靠的抱閘控制、輕負(fù)載升速、快速停車(chē)、超速保護(hù)、預(yù)勵(lì)磁、起動(dòng)預(yù)轉(zhuǎn)矩補(bǔ)償、松繩檢測(cè)、起重機(jī)操作模式、主從控制等特點(diǎn),保證起重行業(yè)使用的安全性、可靠性和高效性;面向起重行業(yè)高、中端用戶需求,有平移機(jī)構(gòu)變頻、全變頻、能耗制動(dòng)、回饋制動(dòng)等多種成熟應(yīng)用方案供用戶選擇;廣泛適用于各種起重機(jī)械的起升、俯仰、變幅、大車(chē)、小車(chē)、回轉(zhuǎn)、抓斗等機(jī)構(gòu)的交流無(wú)級(jí)調(diào)速。
主要技術(shù)特點(diǎn)如下:
u 1、抱閘邏輯控制與監(jiān)控功能——安全、可靠
l 準(zhǔn)確的抱閘開(kāi)啟和閉合控制時(shí)序,通過(guò)抱閘實(shí)時(shí)狀態(tài)反饋和起動(dòng)預(yù)轉(zhuǎn)矩補(bǔ)償,確保控制的安全性和可靠性。
u2、輕負(fù)載升速功能——高效
l 起重機(jī)空鉤或輕載時(shí)實(shí)現(xiàn)2 倍速運(yùn)行,提高裝卸效率。
u3、起重機(jī)操作模式——方便、靈活
l 有操縱桿模式、遙控模式、電動(dòng)電位器模式、分級(jí)式操縱桿給定模式、分級(jí)式遙控給定模式、通訊給定模式等,方便起重機(jī)不同的應(yīng)用場(chǎng)合。
u4、主從控制速度同步技術(shù)——高端運(yùn)用
l 在雙起升機(jī)構(gòu)提升一個(gè)重物時(shí),主從控制速度同步功能保證兩個(gè)起升機(jī)構(gòu)同步提升,確保安全。
5、主從控制功率平衡技術(shù)——高端運(yùn)用
在兩個(gè)大功率電機(jī)通過(guò)減速箱剛性連接驅(qū)動(dòng)一個(gè)起升機(jī)構(gòu)時(shí),主機(jī)采用速度控制, 從機(jī)采用力矩控制,實(shí)現(xiàn)功率平衡,保證兩個(gè)電機(jī)出力均勻。
6、第二電機(jī)控制及切換功能 —— 經(jīng)濟(jì)
一臺(tái)變頻器通過(guò)參數(shù)自學(xué)習(xí)可以自動(dòng)存儲(chǔ)兩四套電機(jī)參數(shù),通過(guò)切換指令實(shí)現(xiàn)對(duì)兩組電機(jī)的高性能矢量控制;便于電氣傳動(dòng)系統(tǒng)的控制,提高用戶競(jìng)爭(zhēng)力。
7、松繩檢測(cè)功能——安全、可靠
防止在起重機(jī)繩索松弛的情況下,輕負(fù)載升速功能誤動(dòng)作引發(fā)的不安全運(yùn)行。
8、專業(yè)的網(wǎng)絡(luò)通訊功能——靈活
支持PROFIBUS-DP、以太網(wǎng)和MODBUS 通訊方式
能實(shí)現(xiàn)多個(gè)變頻器和PLC 之間的通訊連接
實(shí)現(xiàn)變頻器與PC 之間通信和數(shù)據(jù)傳輸,方便監(jiān)控和參數(shù)設(shè)定。
9、控制回路電源和主回路電源可以分別控制——安全
提高了用戶調(diào)試時(shí)的安全性
便于故障診斷與維護(hù)
10、危險(xiǎn)速度監(jiān)視、快速停車(chē)及超速保護(hù)——安全
有速度監(jiān)視和轉(zhuǎn)矩監(jiān)控;
支持3 種快速停車(chē)模式:電氣制動(dòng)的停車(chē)、電氣制動(dòng)加機(jī)械制動(dòng)的停車(chē)、機(jī)械制動(dòng)的停
11、預(yù)勵(lì)磁及起動(dòng)預(yù)轉(zhuǎn)矩補(bǔ)償——安全、可靠
預(yù)勵(lì)磁功能是在啟動(dòng)之前自動(dòng)地對(duì)電機(jī)實(shí)行直流勵(lì)磁,以保證電動(dòng)機(jī)快速地提供起動(dòng)轉(zhuǎn)矩,并通過(guò)設(shè)定起動(dòng)預(yù)轉(zhuǎn)矩補(bǔ)償值和調(diào)節(jié)勵(lì)磁的時(shí)間,使電動(dòng)機(jī)的起動(dòng)與機(jī)械制動(dòng)器的釋放時(shí)間相配合,避免出現(xiàn)“溜鉤”現(xiàn)象。
12、電流矢量控制技術(shù),零速時(shí)實(shí)現(xiàn)200%轉(zhuǎn)矩輸出,對(duì)各類起重機(jī)、提升機(jī)等場(chǎng)合應(yīng)付自如。
快速的轉(zhuǎn)矩響應(yīng)避免提升負(fù)載時(shí)的溜鉤現(xiàn)象
13、多電機(jī)并聯(lián)矢量控制,滿足變頻升降機(jī)控制需要。
四、寶米勒變頻器在施工升降機(jī)上的應(yīng)用
1、設(shè)備相關(guān)參數(shù)介紹
|
設(shè)備參數(shù) |
設(shè)備名稱 |
變頻調(diào)速建筑升降機(jī),單籠無(wú)對(duì)重 |
|
額定載重量(T) |
載重量2T,自重3T |
|
|
提升速度(m/min) |
0~40m/min 可調(diào) |
|
|
電機(jī)、減速箱參數(shù) |
電機(jī)型號(hào) |
客戶自有品牌 |
|
額定功率(kW) |
33kW,3 臺(tái)11kW 電機(jī),采用硬鏈接,同軸輸出 |
|
|
額定電流(A) |
70.5A,單臺(tái)電機(jī)電流23.5A,3 臺(tái)70.5A |
|
|
額定電壓(V) |
380V |
|
|
額定轉(zhuǎn)速(RPM) |
1395 |
|
|
額定頻率(Hz) |
50 |
|
|
電氣系統(tǒng)參數(shù) |
PLC |
ABB |
|
變頻器 |
MC200G0450T4 |
|
|
制動(dòng)單元 |
DBU-055-4 |
|
|
輸入電抗器 |
120A/0.13mH |
|
|
旋轉(zhuǎn)編碼器 |
1024 線、10V~30V 電源(軸套式) |
|
|
制動(dòng)電阻 |
阻值:5 歐姆;功率:50kW |
2、系統(tǒng)原理分析
機(jī)械系統(tǒng)
此系統(tǒng)所用升降機(jī),為單籠無(wú)對(duì)重式建筑專用人貨升降機(jī),工作高度為0~200m,設(shè)計(jì)提升極限速度為40m/min,整個(gè)系統(tǒng)采用安裝在支架上的齒條傳動(dòng),沿固定軌道進(jìn)行運(yùn)動(dòng),齒條可隨意裝載與拆除,從而實(shí)現(xiàn)任意調(diào)整升降機(jī)的工作高度。系統(tǒng)的動(dòng)力來(lái)源為三個(gè)并聯(lián)連接的電機(jī)同時(shí)提供動(dòng)力,三電機(jī)的輸出力矩均衡,輸出功率平衡。升降機(jī)系統(tǒng)采用了相對(duì)較為完善的安全控制系統(tǒng),系統(tǒng)中使用了PLC 及變頻器,升降機(jī)下降時(shí),系統(tǒng)處于發(fā)電狀態(tài),回饋能量通過(guò)制動(dòng)電阻消耗。
電氣系統(tǒng)
電氣控制系統(tǒng)略圖如下:
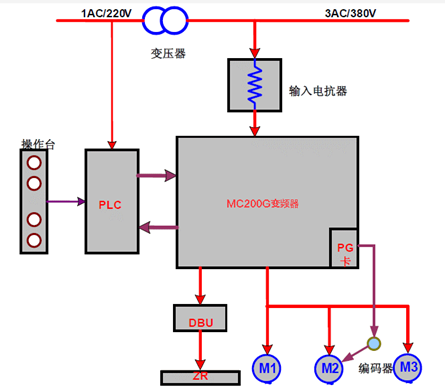
電氣控制系統(tǒng),主要由PLC、變頻器、傳動(dòng)電動(dòng)機(jī)、減速機(jī)、制動(dòng)單元、制動(dòng)電阻箱、操作手柄、交流輸入電抗器、編碼器、變壓器等設(shè)備組成,實(shí)現(xiàn)對(duì)升降機(jī)的起停控制、上下運(yùn)行、快慢行走、開(kāi)閘抱閘控制及各種保護(hù)的控制,從而實(shí)現(xiàn)升降機(jī)的高效、安全、穩(wěn)定運(yùn)行。
在整個(gè)升降機(jī)的電氣控制系統(tǒng)中,變頻調(diào)速器是最為關(guān)鍵的控制設(shè)備,變頻器質(zhì)量與性能的好壞,將直接影響到升降機(jī)的使用。寶米勒起重機(jī)專用變頻器,能夠提供完備的抱閘、松閘邏輯控制、高低速切換控制、開(kāi)環(huán)閉環(huán)切換控制、多電機(jī)并聯(lián)矢量控制、可調(diào)節(jié)的制動(dòng)電壓控制、高頻弱磁運(yùn)行控制等功能,從而實(shí)現(xiàn)對(duì)升降機(jī)的完美控制。
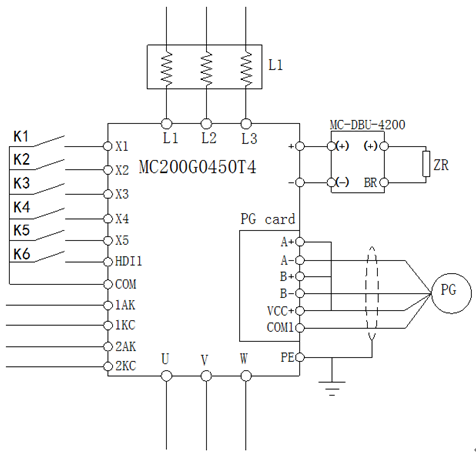
3、變頻器周邊連接圖內(nèi)容說(shuō)明
|
圖標(biāo)符號(hào) |
含義解釋 |
備注 |
|
MC200G0450T4 |
起重機(jī)專用變頻器 |
功率:45kW |
|
DBU-055G-4 |
制動(dòng)單元 |
功率:55kW |
|
ZR |
制動(dòng)電阻箱 |
5 歐姆/50kW |
|
S1~S5、HDI1 |
開(kāi)關(guān)量輸入端子 |
輸入阻抗3.3k 歐姆 |
|
K1 |
K1:上升(上行) |
開(kāi)關(guān),閉合有效 |
|
K2 |
K2:下降(下行) |
開(kāi)關(guān),閉合有效 |
|
K3 |
K3:外部故障輸入 |
開(kāi)關(guān),斷開(kāi)有效 |
|
K4 |
K4:故障復(fù)位 |
脈沖,上升沿有效,復(fù)位功能 |
|
K5 |
K5:高速運(yùn)行 |
開(kāi)關(guān),閉合有效 |
|
K6 |
K6:低速運(yùn)行 |
此處為開(kāi)關(guān)端子,閉合有效 |
|
COM |
公共端 |
+24V 的地 |
|
RO1-RO2 繼電器 |
帶常開(kāi)與常閉輸出功能 |
AC250V/3A |
|
RO1A-RO1C故障報(bào)警 |
常開(kāi)輸出 |
變頻器有故障時(shí),吸合 |
|
RO2A-RO2B 抱閘控制 |
常閉輸出 |
需要輸出抱閘控制時(shí),打開(kāi) |
|
L1 輸入交流電抗器 |
輸入交流電抗器 |
120A/0.13mH |
|
PG Card |
PG 反饋測(cè)速卡 |
接收旋轉(zhuǎn)編碼器信號(hào)的轉(zhuǎn)換卡 |
|
VCC+ |
PG 編碼器電源 |
12V~15V,輸出可調(diào)節(jié) |
|
COM1 |
PG 編碼器電源地 |
VCC+的地 |
|
PG |
旋轉(zhuǎn)編碼器(TONGHOW) |
1024 線/12V~30V 電源輸入 |
|
R、S、T |
變頻器三相輸入端子 |
|
|
U、V、W |
變頻器三相輸出端子 |
|
|
X1、X2、X3 |
三相 380V 電源 |
|
|
U1/U2/U3 |
三臺(tái)異步電動(dòng)機(jī)的接線端子組合,并聯(lián) 連接在變頻器的輸出端上。 |
|
|
V1/V2/V3 |
|
|
|
W1/W2/W3 |
|
4、變頻參數(shù)設(shè)定
依據(jù)外部端子的接線功能要求及控制要求,變頻器內(nèi)部參數(shù)設(shè)置如下:
|
功能碼 |
功能含義 |
參數(shù)設(shè)置 |
功能描述 |
備注 |
|
F0-01 |
速度控制模式 |
1/3 |
1:無(wú)PG 矢量控制(SVC) 3:有PG 矢量控制(VC) |
兩種控制模式,全部進(jìn)行了調(diào)試。 |
|
F0-02 |
速度指令選擇 |
4 |
多段速端子給定 |
采用兩段速控制 |
|
F0-03 |
運(yùn)行指令通道 |
1 |
端子指令通道 |
|
|
F0-02 |
速度指令選擇 |
4 |
多段速端子給定 |
采用兩段速控制 |
|
F0-10 |
最大輸出頻率 |
60.00 |
最大頻率60Hz |
對(duì)應(yīng)42m/min 的升降機(jī)運(yùn)行速度 |
|
FC-00 |
多段速分級(jí)給定1 |
28.0 |
最大頻率的28%(低速) |
運(yùn)行頻率16.8Hz |
|
FC-01 |
多段速分級(jí)給定2 |
100.0 |
最大頻率的100%(高速) |
運(yùn)行頻率60Hz |
|
F8-03 |
直線加速時(shí)間 |
6.0 |
6 秒加速時(shí)間 |
|
|
F8-04 |
直線減速時(shí)間 |
2.0 |
2 秒減速時(shí)間 |
|
|
F6-03 |
起動(dòng)開(kāi)始頻率 |
1.50 |
起動(dòng)頻率為1.5HZ |
在無(wú)PG 矢量控制時(shí)使用,確保升降機(jī)起動(dòng)瞬間不溜鉤 |
|
F6-04 |
起動(dòng)頻率保持時(shí)間 |
0.2 |
起動(dòng)頻率的保持時(shí)間為 0.2秒 |
|
|
電機(jī)參數(shù)組 |
||||
|
F1-00 |
電機(jī)額定功率 |
33.0 |
為3 臺(tái)11kW 電機(jī)的功率總和 |
|
|
F1-03 |
電機(jī)額定頻率 |
50.00 |
額定頻率為50Hz |
|
|
F1-04 |
電機(jī)額定轉(zhuǎn)速 |
1395 |
額定轉(zhuǎn)速為1395RPM |
|
|
F1-01 |
電機(jī)額定電壓 |
380 |
額定電壓為380V |
|
|
F1-02 |
電機(jī)額定電流 |
70.5 |
額定電流為3 臺(tái)電機(jī)的電流總和 |
|
|
F1-05 |
電機(jī)定子電阻 |
0.123 |
|
通過(guò)參數(shù)自學(xué)習(xí)得到相關(guān)參數(shù) |
|
F1-06 |
電機(jī)轉(zhuǎn)子電阻 |
0.249 |
|
|
|
F1-07 |
電機(jī)定、轉(zhuǎn)子電感 |
23.4 |
|
|
|
F1-08 |
電機(jī)定、轉(zhuǎn)子互感 |
22.8 |
|
|
|
F1-09 |
電機(jī)空載電流 |
30.74 |
|
|
|
輸入輸出端子組 |
||||
|
F4-50 |
S1 端子功能選擇 |
1 |
正轉(zhuǎn)運(yùn)行,升降機(jī)上行 |
|
|
F4-51 |
S2 端子功能選擇 |
2 |
反轉(zhuǎn)運(yùn)行,升降機(jī)下行 |
|
|
F4-52 |
S3 端子功能選擇 |
8 |
外部故障輸入 |
|
|
F4-53 |
S4 端子功能選擇 |
7 |
故障復(fù)位 |
|
|
F4-54 |
S5 端子功能選擇 |
5 |
多段速端子1 |
X4 閉合為低速段 X3 和HDI1 閉合為高速段 |
|
F4-55 |
HDI1 端子功能選擇 |
10 |
多段速端子2 |
|
|
F5-02 |
RO1 輸出選擇 |
15 |
故障輸出 |
故障輸出時(shí),抱閘輸出有效。 |
|
F5-32 |
RO2 輸出選擇 |
7 |
抱閘輸出 |
|
|
抱閘控制邏輯 |
||||
|
F5-33 |
抱閘、接觸器控制選擇(只適合端子指令通道) |
1 |
抱閘由變頻器控制,接觸器由外部控制器控制 |
|
|
F5-34 |
抱閘合閘延時(shí) |
0s |
該時(shí)間可以配合停機(jī)抱閘頻率來(lái)調(diào)整 |
|
|
F5-35 |
抱閘松閘延時(shí) |
0s |
|
|
|
F5-36 |
停機(jī)抱閘頻率 |
3Hz |
對(duì)于開(kāi)環(huán)矢量控制,該頻率可以有效防止停機(jī)抱閘時(shí)溜鉤 |
|
|
F5-37 |
停機(jī)延時(shí)時(shí)間 |
0.2s |
定義變頻器抱閘合閘信號(hào)輸出后。變頻器可以持續(xù)維持輸出轉(zhuǎn)矩的時(shí)間,用來(lái)消除停機(jī)時(shí)溜鉤問(wèn)題。 |
|
五、調(diào)試及現(xiàn)場(chǎng)測(cè)試波形
檢查接線正確無(wú)誤,試運(yùn)行后一切正常后,需對(duì)電機(jī)進(jìn)行參數(shù)自學(xué)習(xí)。 對(duì)于一拖多并聯(lián)矢量控制,電機(jī)參數(shù)輸入需要注意:
1、 一拖多系統(tǒng)中,電機(jī)組參數(shù)中,電機(jī)額定功率輸入是否為各臺(tái)電機(jī)之和;
2、 一拖多系統(tǒng)中,電機(jī)組參數(shù)中,電機(jī)額定電流輸入是否為各臺(tái)電機(jī)之和;
3、 輸入合理的自學(xué)習(xí)加減速時(shí)間。
4、 由于此系統(tǒng)采用主電路和控制電路一起供電方式,變頻器參數(shù)輸入后,進(jìn)行邏輯時(shí)序驗(yàn)證時(shí),要注意現(xiàn)場(chǎng)情況,以防意外發(fā)生。
在現(xiàn)場(chǎng)對(duì)閉環(huán)矢量控制和開(kāi)環(huán)矢量控制兩種控制方式進(jìn)行了調(diào)試和功能驗(yàn)證。合理設(shè)定變頻器松、抱閘邏輯時(shí)序相關(guān)參數(shù),實(shí)現(xiàn)在啟動(dòng)、停止無(wú)明顯溜鉤現(xiàn)象;高、低速運(yùn)行,電機(jī)和變頻器運(yùn)行正常,達(dá)到良好的控制效果。
下面附上在滿載實(shí)驗(yàn)時(shí)現(xiàn)場(chǎng)記錄波形:
滿載運(yùn)行測(cè)試(42m/min),運(yùn)行中相關(guān)參數(shù)的動(dòng)態(tài)捕捉及說(shuō)明
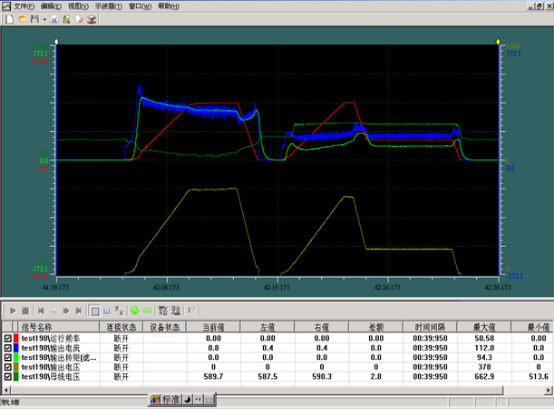
上圖為升降機(jī)在42m/min 的上升與下降運(yùn)行的過(guò)程狀態(tài)參數(shù)波形圖: 該波形圖同時(shí)監(jiān)控了運(yùn)行頻率、輸出電流、輸出轉(zhuǎn)矩、輸出電壓、母線電壓參數(shù)。從該圖中,能夠清晰反應(yīng)在升降機(jī)的運(yùn)行過(guò)程中,變頻器的運(yùn)行狀況。升降機(jī)經(jīng)歷了上升啟動(dòng)開(kāi)閘、加速上升、平穩(wěn)上升、減速上升、上升停機(jī)報(bào)閘、停機(jī)、下降啟動(dòng)開(kāi)閘、加速下降、高速平穩(wěn)下降、低速平穩(wěn)下降、下降停機(jī)抱閘,停機(jī)的全過(guò)程。
六、變頻升降機(jī)的優(yōu)勢(shì)
施工升降機(jī)采用變頻調(diào)速后,使升降機(jī)實(shí)現(xiàn)平穩(wěn)操作,提高運(yùn)行效率,消除起制動(dòng)沖擊, 減少電氣維護(hù),降低電能消耗,提高功率因素等。變頻調(diào)速方法具有的顯著特點(diǎn)如下:
1、 效率高,最高運(yùn)行速度可打傳統(tǒng)升降機(jī)兩倍;
2、 無(wú)極調(diào)速有效解決結(jié)構(gòu)和機(jī)構(gòu)的沖擊,延長(zhǎng)齒輪、齒條、滾輪等機(jī)械結(jié)構(gòu)的使用壽命;
3、 變頻器的軟啟動(dòng)功能,降低了電機(jī)啟動(dòng)時(shí)對(duì)電網(wǎng)的沖擊電流,緩解了用電設(shè)備間的相互影響。
4、 可選擇的加減速曲線,保證人乘坐的舒適感和減少載貨時(shí)的沖擊;可調(diào)節(jié)加減速時(shí)間和運(yùn)行頻率,確保升降機(jī)的準(zhǔn)確平層。降低對(duì)司機(jī)的要求。
5、采用變頻器減少了升降機(jī)的設(shè)備維護(hù)成本,為企業(yè)帶來(lái)經(jīng)濟(jì)效益。

